Robotic swarms navigate their way individually in an
unknown environment towards the destination point, avoiding obstacles.
Efficient pathway is determined by the leader robot, communicating with the on
and off-track swarms. Then the assigned work can be accomplished through the
economic path by the robots.
IEEE Xplore - Digital Library | Electronic ISBN: 978-1-4673-9916-6
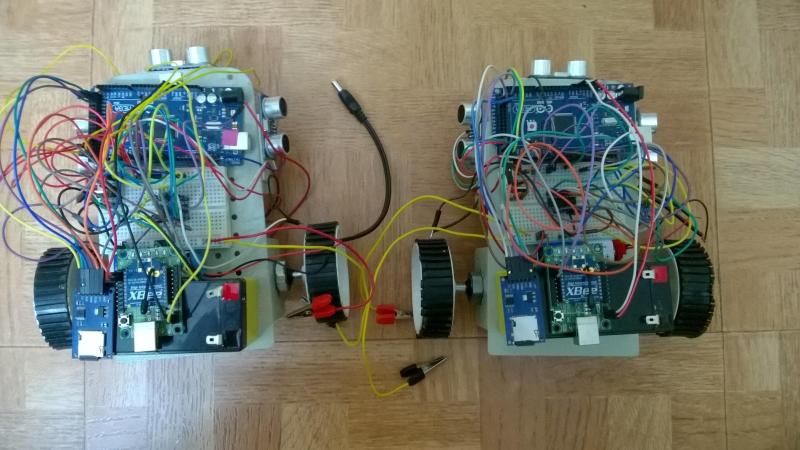
Components:
- Arduino Mega
- Zigbee
- SD card
- Ultrasonic sensor
- L293D
- 12V lead acid battery
- DC motors
Comments
Post a Comment